This post is fourth in a series on object detection. The other posts can be found here, here, and here.
The last post covered use of anchor boxes for detecting multiple objects in an image. I ended that one with a model that was doing fine with detecting the presence of various objects, but the predicted bounding boxes were not able to properly localize objects with non-squared shapes. This post will detail techniques for further improving that baseline model.
The approach used below is based on learnings from fastai’s Deep Learning MOOC (Part 2).
pip install -q fastai==0.7.0 torchtext==0.2.3
!wget -qq http://pjreddie.com/media/files/VOCtrainval_06-Nov-2007.tar
!tar -xf VOCtrainval_06-Nov-2007.tar
!wget -qq https://storage.googleapis.com/coco-dataset/external/PASCAL_VOC.zip
!unzip -q PASCAL_VOC.zip
!mkdir -p data/pascal
!mv PASCAL_VOC/* data/pascal
!mv VOCdevkit data/pascal
%matplotlib inline
%reload_ext autoreload
%autoreload 2
from fastai.conv_learner import *
from fastai.dataset import *
import json, pdb
from PIL import ImageDraw, ImageFont
from matplotlib import patches, patheffects
PATH = Path('data/pascal')
trn_j = json.load((PATH / 'pascal_train2007.json').open())
IMAGES,ANNOTATIONS,CATEGORIES = ['images', 'annotations', 'categories']
FILE_NAME,ID,IMG_ID,CAT_ID,BBOX = 'file_name','id','image_id','category_id','bbox'
cats = dict((o[ID], o['name']) for o in trn_j[CATEGORIES])
trn_fns = dict((o[ID], o[FILE_NAME]) for o in trn_j[IMAGES])
trn_ids = [o[ID] for o in trn_j[IMAGES]]
JPEGS = 'VOCdevkit/VOC2007/JPEGImages'
IMG_PATH = PATH/JPEGS
Setup
Importing all the necessary functions from last time so as to save some space.
from helper_functions import *
!mkdir -p {PATH}/tmp
trn_anno = get_trn_anno()
CLAS_CSV = PATH/'tmp/clas.csv'
MBB_CSV = PATH/'tmp/mbb.csv'
f_model=resnet34
sz=224
bs=64
mc = [[cats[p[1]] for p in trn_anno[o]] for o in trn_ids]
id2cat = list(cats.values())
cat2id = {v:k for k,v in enumerate(id2cat)}
mcs = np.array([np.array([cat2id[p] for p in o]) for o in mc])
val_idxs = get_cv_idxs(len(trn_fns))
((val_mcs,trn_mcs),) = split_by_idx(val_idxs, mcs)
mbb = [np.concatenate([p[0] for p in trn_anno[o]]) for o in trn_ids]
mbbs = [' '.join(str(p) for p in o) for o in mbb]
df = pd.DataFrame({'fn': [trn_fns[o] for o in trn_ids], 'bbox': mbbs}, columns=['fn','bbox'])
df.to_csv(MBB_CSV, index=False)
aug_tfms = [RandomRotate(3, p=0.5, tfm_y=TfmType.COORD),
RandomLighting(0.05, 0.05, tfm_y=TfmType.COORD),
RandomFlip(tfm_y=TfmType.COORD)]
tfms = tfms_from_model(f_model, sz, crop_type=CropType.NO, tfm_y=TfmType.COORD, aug_tfms=aug_tfms)
md = ImageClassifierData.from_csv(PATH, JPEGS, MBB_CSV, tfms=tfms, bs=bs,val_idxs=val_idxs, continuous=True, num_workers=4)
trn_ds2 = ConcatLblDataset(md.trn_ds, trn_mcs)
val_ds2 = ConcatLblDataset(md.val_ds, val_mcs)
md.trn_dl.dataset = trn_ds2
md.val_dl.dataset = val_ds2
import matplotlib.cm as cmx
import matplotlib.colors as mcolors
from cycler import cycler
num_colr = 12
cmap = get_cmap(num_colr)
colr_list = [cmap(float(x)) for x in range(num_colr)]
loss_f = BCE_Loss(len(id2cat))
Current status of model
Till now we’ve only used the final convolutional feature maps of grid size (4 x 4) for 16 anchor boxes, which are of a fixed size and a fixed aspect ratio. Since the activations coming from the model can only modify the shape of these anchor boxes by 50%, the predicted bounding boxes can only do a good job on objects which are similar in size to these anchor boxes. Hence, as seen in the validation results last time, the model is not able to properly localize an object which is larger in size than the maximum possible bounding box.
One way to solve this problem would be to start with anchor boxes of varied shapes and sizes to begin with. We can also have these anchors lie on grids corresponding to different scales. Last time we had 16 anchors on a 4 x 4 grid. We can allow prediction of detections at multiple scales by adding more convolutional layers in the custom head and using their activations for predictions. So this time we’ll use activations from the convolutional feature maps of grid sizes 4 x 4, 2 x 2, and 1 x 1.
Let’s create more anchor boxes.
anc_grids = [4,2,1]
anc_zooms = [0.7, 1., 1.3]
anc_ratios = [(1.,1.), (1.,0.5), (0.5,1.)]
anchor_scales = [(anz*i,anz*j) for anz in anc_zooms for (i,j) in anc_ratios]
k = len(anchor_scales)
anc_offsets = [1/(o*2) for o in anc_grids]
anc_x = np.concatenate([np.repeat(np.linspace(ao, 1-ao, ag), ag)
for ao,ag in zip(anc_offsets,anc_grids)])
anc_y = np.concatenate([np.tile(np.linspace(ao, 1-ao, ag), ag)
for ao,ag in zip(anc_offsets,anc_grids)])
anc_ctrs = np.repeat(np.stack([anc_x,anc_y], axis=1), k, axis=0)
anc_sizes = np.concatenate([np.array([[o/ag,p/ag] for i in range(ag*ag) for o,p in anchor_scales])
for ag in anc_grids])
grid_sizes = V(np.concatenate([np.array([ 1/ag for i in range(ag*ag) for o,p in anchor_scales])
for ag in anc_grids]), requires_grad=False).unsqueeze(1)
anchors = V(np.concatenate([anc_ctrs, anc_sizes], axis=1), requires_grad=False).float()
anchor_cnr = hw2corners(anchors[:,:2], anchors[:,2:])
print(k)
9
We have 9 variants of an anchor box at a given grid cell location.
16*k + 4*k +1*k
189
anchors.shape
torch.Size([189, 4])
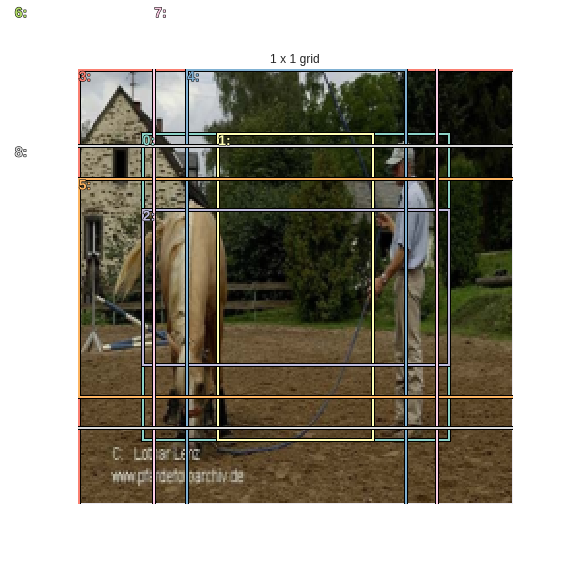
We have a total of 189 anchor boxes this time. Let’s plot them on an image to see how they look.
itr = iter(md.val_dl)
next(itr)
x,y = next(itr)
ima=md.val_ds.ds.denorm(to_np(x))[10]
As mentioned above the last 9 anchor boxes correspond to a (1 x 1) grid.
fig, ax = plt.subplots(figsize=(8,8))
torch_gt(ax, ima, anchor_cnr[-1*k:], None);
ax.set_title('1 x 1 grid');
fig_name = f'plots-1.png'
plt.savefig(fig_name)
print(f'')
plt.close(fig)
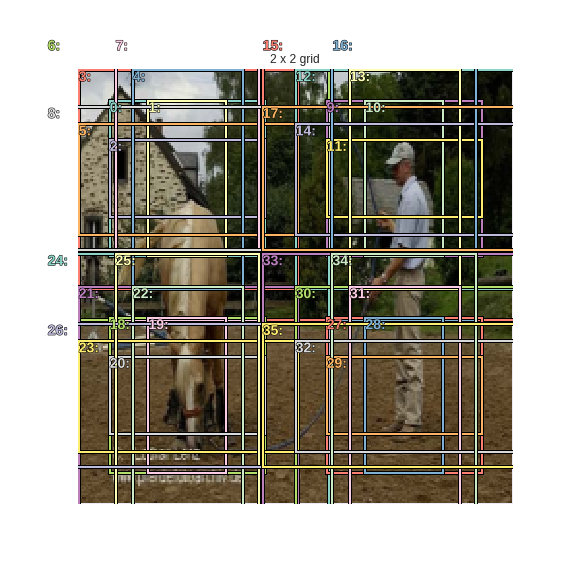
Looks good. Let’s plot the 36 anchor boxes corresponding to a (2 x 2) grid.
fig, ax = plt.subplots(figsize=(8,8))
torch_gt(ax, ima, anchor_cnr[16*k:16*k+4*k], None);
ax.set_title('2 x 2 grid');
fig_name = f'plots-2.png'
plt.savefig(fig_name)
print(f'')
plt.close(fig)
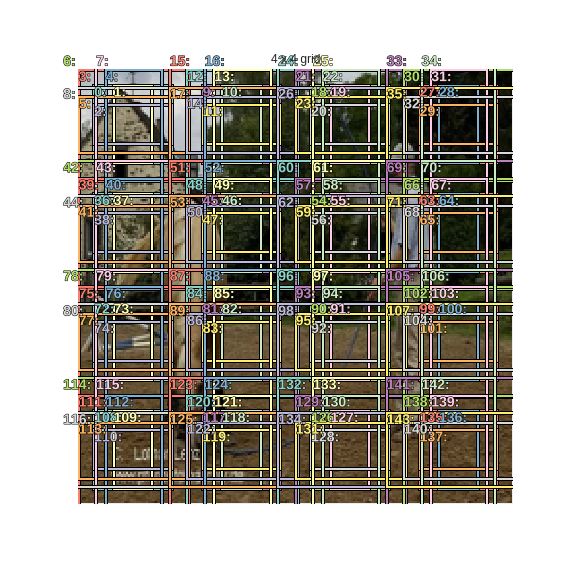
Finally, the 144 anchor boxes corresponding to (4 x 4) grid.
fig, ax = plt.subplots(figsize=(8,8))
torch_gt(ax, ima, anchor_cnr[:16*k], None);
ax.set_title('4 x 4 grid');
fig_name = f'plots-3.png'
plt.savefig(fig_name)
print(f'')
plt.close(fig)
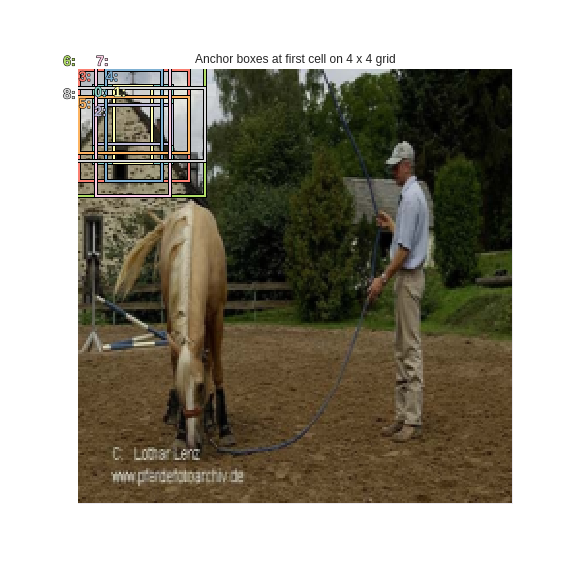
That’s a lot of anchor boxes. Let’s just plot the 9 corresponding to the first cell.
fig, ax = plt.subplots(figsize=(8,8))
torch_gt(ax, ima, anchor_cnr[:9], None);
ax.set_title('Anchor boxes at first cell on 4 x 4 grid');
fig_name = f'plots-4.png'
plt.savefig(fig_name)
print(f'')
plt.close(fig)
Finally, let’s plot all 9 variations on different grid locations so as to see the difference clearly. The corresponding anchor scaling is also plotted.
i = 0
l = []
for j in range(9):
l.append(j*9+j)
print(l)
[0, 10, 20, 30, 40, 50, 60, 70, 80]
fig, ax = plt.subplots(figsize=(8,8))
torch_gt(ax, ima, anchor_cnr[l], None, forced_text=anchor_scales);
fig_name = f'plots-5.png'
plt.savefig(fig_name)
print(f'')
plt.close(fig)

By using all of these 189 anchor boxes we now have a much better chance of detecting objects of varying shapes and sizes. Time to modify the custom head.
Custom head
As mentioned above, we need to add 2 more convolutional layers with stride 2 and use the activations coming from all 4 layers for predictions. Copying the custom convolutional modules from last time.
class StdConv(nn.Module):
def __init__(self, nin, nout, stride=2, drop=0.1):
super().__init__()
self.conv = nn.Conv2d(nin, nout, 3, stride=stride, padding=1)
self.bn = nn.BatchNorm2d(nout)
self.drop = nn.Dropout(drop)
def forward(self, x): return self.drop(self.bn(F.relu(self.conv(x))))
def flatten_conv(x,k):
bs,nf,gx,gy = x.size()
x = x.permute(0,2,3,1).contiguous()
return x.view(bs,-1,nf//k)
class OutConv(nn.Module):
def __init__(self, k, nin, bias):
super().__init__()
self.k = k
self.oconv1 = nn.Conv2d(nin, (len(id2cat)+1)*k, 3, padding=1)
self.oconv2 = nn.Conv2d(nin, 4*k, 3, padding=1)
self.oconv1.bias.data.zero_().add_(bias)
def forward(self, x):
return [flatten_conv(self.oconv1(x), self.k),
flatten_conv(self.oconv2(x), self.k)]
The ResNet backbone results in a tensor of shape (64,512,7,7). Let’s put it through a Conv2d with stride 1 and 256 output planes.
cnv_512 = StdConv(512,256,stride=1)
cnv_256 = StdConv(256,256)
output_from_backbone = Variable(torch.randn(64,512,7,7))
out_cnv = OutConv(k, 256, -4.)
conv_out_1 = cnv_256(cnv_512(output_from_backbone))
conv_out_1.shape
torch.Size([64, 256, 4, 4])
out1 = out_cnv(conv_out_1)
out1[0].shape,out1[1].shape
(torch.Size([64, 144, 21]), torch.Size([64, 144, 4]))
The above are the first set of activations that we’ll use for predictions and these correspond to a 441 anchor boxes on a grid size of (7 x 7).
Next, let’s have a convolutional layer with stride 2 that brings the feature map dimensions down to 4 x 4.
conv_out_2 = cnv_256(conv_out_1)
conv_out_2.shape
torch.Size([64, 256, 2, 2])
out2 = out_cnv(conv_out_2)
out2[0].shape,out2[1].shape
(torch.Size([64, 36, 21]), torch.Size([64, 36, 4]))
The above are the second set of activations that we’ll use for predictions and these correspond to a 144 anchor boxes on a grid size of (4 x 4).
Next, let’s have the final convolutional layer with stride 2 which result in feature maps of grid size (1 x 1).
conv_out_3 = cnv_256(conv_out_2)
conv_out_3.shape
torch.Size([64, 256, 1, 1])
out3 = out_cnv(conv_out_3)
out3[0].shape,out3[1].shape
(torch.Size([64, 9, 21]), torch.Size([64, 9, 4]))
The above are the third set of activations that we’ll use for predictions and these correspond to 9 anchor boxes on a grid size of (1 x 1).
So we’ve changed the architecture from last time by adding 2 more convolutional layers. This model will concatenate these tensors and output a list of two tensors containing 189 sets of activations for both classification and localization as compared to 16 earlier.
torch.cat([out1[0],out2[0],out3[0]], dim=1).shape
torch.Size([64, 189, 21])
torch.cat([out1[1],out2[1],out3[1]], dim=1).shape
torch.Size([64, 189, 4])
Let’s put all of this in a single module.
drop=0.4
class SSD_MultiHead(nn.Module):
def __init__(self, k, bias):
super().__init__()
self.drop = nn.Dropout(drop)
self.sconv0 = StdConv(512,256, stride=1, drop=drop)
self.sconv1 = StdConv(256,256, drop=drop)
self.sconv2 = StdConv(256,256, drop=drop)
self.sconv3 = StdConv(256,256, drop=drop)
self.out0 = OutConv(k, 256, bias)
self.out1 = OutConv(k, 256, bias)
self.out2 = OutConv(k, 256, bias)
self.out3 = OutConv(k, 256, bias)
def forward(self, x):
x = self.drop(F.relu(x))
x = self.sconv0(x)
x = self.sconv1(x)
o1c,o1l = self.out1(x)
x = self.sconv2(x)
o2c,o2l = self.out2(x)
x = self.sconv3(x)
o3c,o3l = self.out3(x)
return [torch.cat([o1c,o2c,o3c], dim=1),
torch.cat([o1l,o2l,o3l], dim=1)]
That’s it for the architecture. The 189 anchor boxes are arranged in the order corresponding to the activations coming from the network, which means that the loss function ssd_loss from last time can be used without any modifications since the activations and anchor boxes are mapped one-to-one.
Training
head_reg4 = SSD_MultiHead(k, -4.)
models = ConvnetBuilder(f_model, 0, 0, 0, custom_head=head_reg4)
learn = ConvLearner(md, models)
learn.opt_fn = optim.Adam
learn.crit = ssd_loss
lr = 1e-2
lrs = np.array([lr/100,lr/10,lr])
learn.lr_find(lrs/1000,1.)
learn.sched.plot(n_skip_end=2)
learn.fit(lrs, 1, cycle_len=4, use_clr=(20,8))
epoch trn_loss val_loss
0 22.98593 23.285165
1 19.25035 15.106181
2 16.641781 13.666947
3 14.801657 13.034863
[array([13.03486])]
learn.freeze_to(-2)
learn.fit(lrs/2, 1, cycle_len=4, use_clr=(20,8))
epoch trn_loss val_loss
0 14.148568 17.447378
1 13.448161 12.855588
2 12.329596 11.981028
3 11.378326 11.402132
[array([11.40213])]
Let’s take a look at the results.
def show_validation_batch(batch_num, show_bg=False, thresh=0.01):
val_iter = iter(md.val_dl)
for i in range(batch_num):
next(val_iter)
x,y = next(val_iter)
fig, axes = plt.subplots(4, 3, figsize=(12, 16))
x,y = V(x),V(y)
learn.model.eval()
batch = learn.model(x)
b_clas,b_bb = batch
for idx,ax in enumerate(axes.flat):
b_clasi = b_clas[idx]
b_bboxi = b_bb[idx]
ima=md.val_ds.ds.denorm(to_np(x))[idx]
bbox,clas = get_y(y[0][idx], y[1][idx])
a_ic = actn_to_bb(b_bb[idx], anchors)
overlaps = jaccard(bbox.data, anchor_cnr.data)
gt_overlap,gt_idx = map_to_ground_truth(overlaps)
gt_clas = clas[gt_idx]
pos = gt_overlap > thresh
pos_idx = torch.nonzero(pos)[:,0]
gt_clas[1-pos] = len(id2cat)
not_bg = (b_clasi.max(1)[1]!=len(id2cat)).nonzero().view(-1)
if show_bg:
torch_gt(ax, ima, a_ic, b_clasi.max(1)[1], b_clasi.max(1)[0].sigmoid(), thresh=thresh);
else:
torch_gt(ax, ima, a_ic[not_bg], b_clasi.max(1)[1][not_bg], b_clasi.max(1)[0][not_bg].sigmoid(), thresh=thresh);
plt.tight_layout()
fig_name = f'plots-6-batch-{batch_num}.png'
plt.savefig(fig_name)
print(f'')
plt.close(fig)
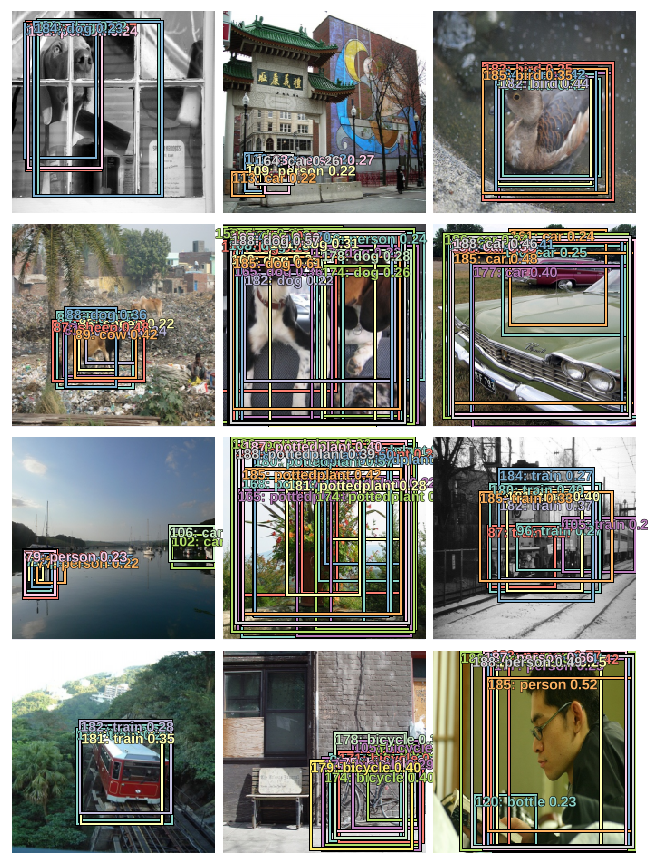
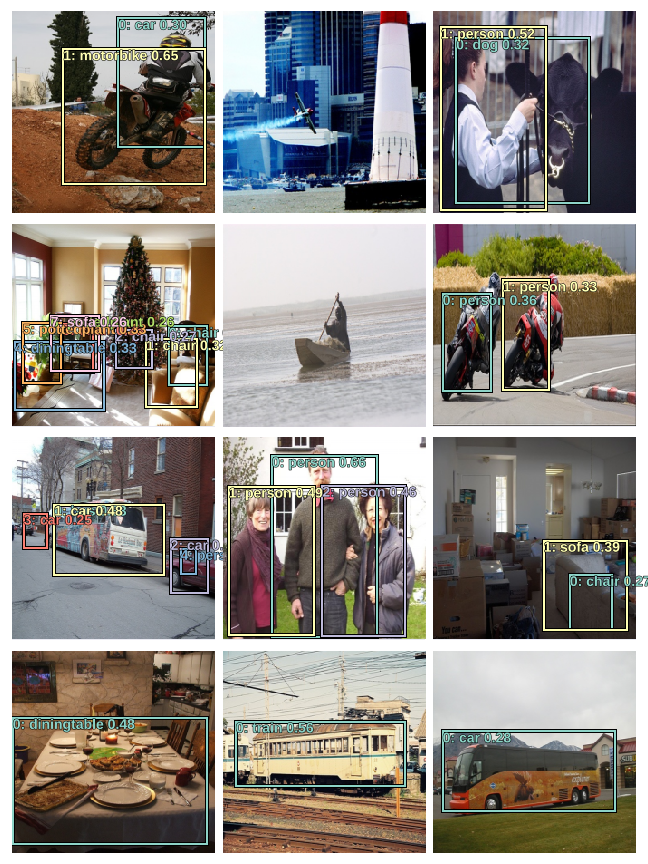
show_validation_batch(1, thresh=0.2)
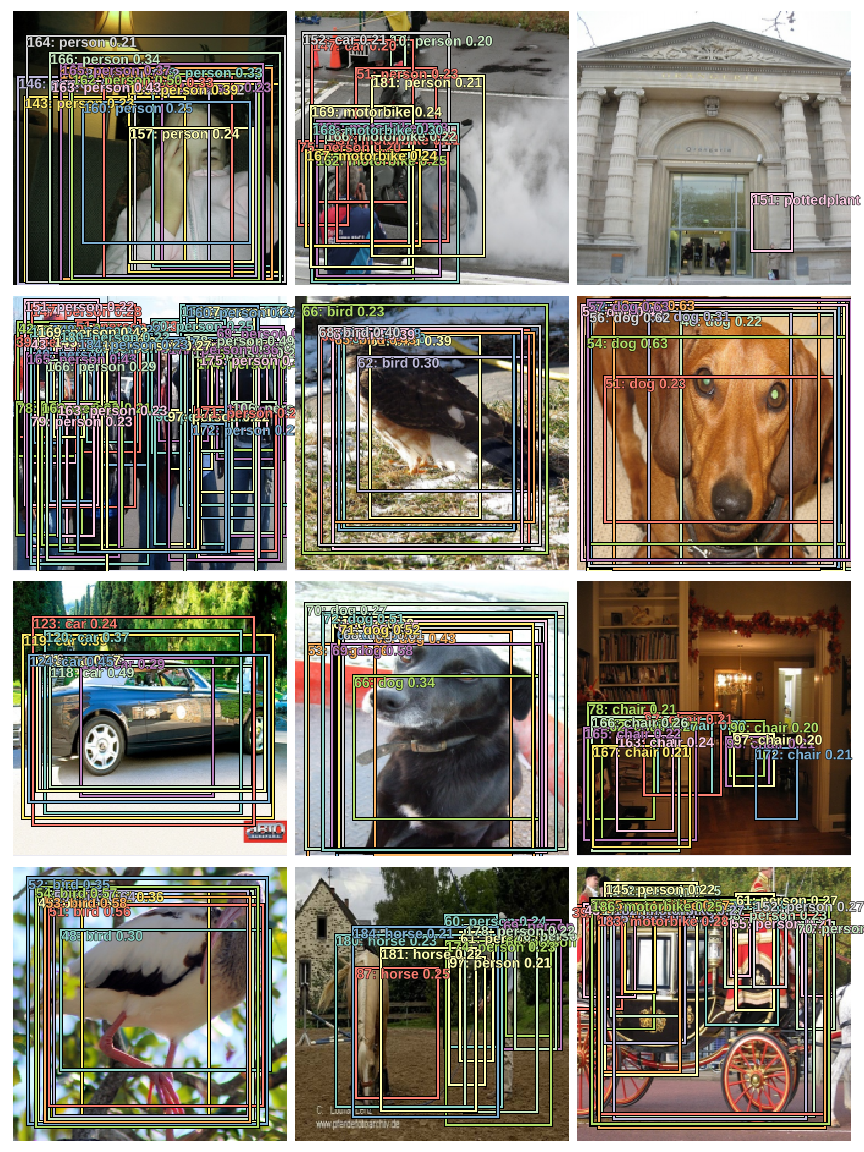
show_validation_batch(2, thresh=0.2)
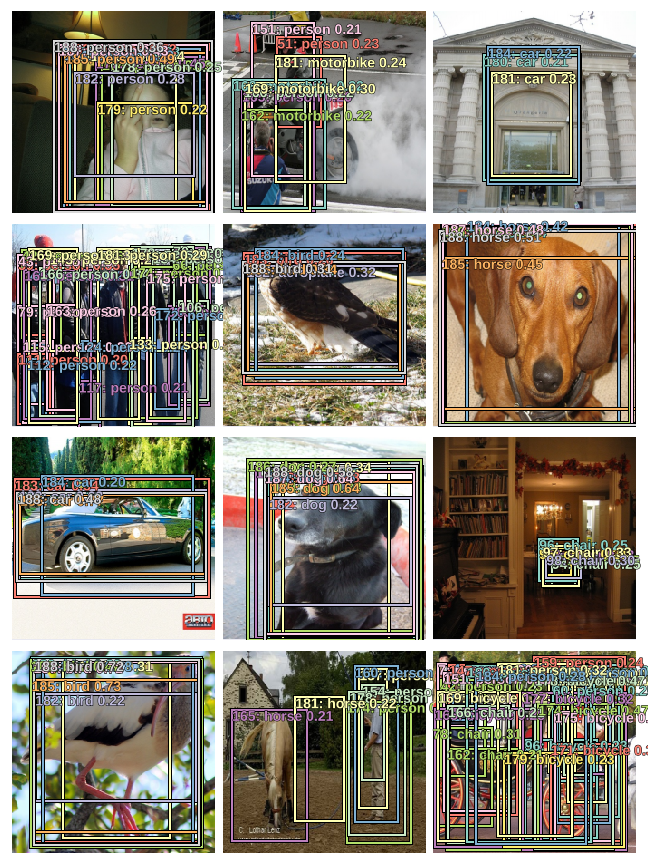
Let’s compare the above with the results from last time.
Results from last time:
As evident from the images above, the model is doing better than last time, especially on large objects. This is the result of using anchor boxes of different shapes at multiple scales.
Using Focal loss
The loss criterion ssd_loss uses BCE_Loss as the classification loss criteria as defined above. Let’s use focal loss instead of the standard cross-entropy loss to get better results. We can do that by simple overriding the get_weight method defined in the BCE_Loss class.
class FocalLoss(BCE_Loss):
def get_weight(self,x,t):
alpha,gamma = 0.25,2
p = x.sigmoid()
pt = p*t + (1-p)*(1-t)
w = alpha*t + (1-alpha)*(1-t)
return w * (1-pt).pow(gamma)
loss_f = FocalLoss(len(id2cat))
learn.lr_find(lrs/1000,1.)
learn.sched.plot(n_skip_end=1)
learn.fit(lrs, 1, cycle_len=10, use_clr=(20,10))
epoch trn_loss val_loss
0 12.296044 17.881611
1 14.069504 16.269705
2 13.887531 16.88969
3 13.093471 12.81302
4 12.106579 12.44246
5 11.986497 15.610915
6 11.87363 12.373115
7 11.143738 11.851826
8 10.382161 11.40408
9 9.791606 11.260116
[array([11.26012])]
learn.save('multi_anchor_189_stage_1')
learn.freeze_to(-2)
learn.fit(lrs/4, 1, cycle_len=10, use_clr=(20,10))
epoch trn_loss val_loss
0 9.087099 11.899447
1 8.991511 11.448938
2 8.805311 11.275349
3 8.51155 11.397906
4 8.232354 11.15149
5 7.943597 11.154927
6 7.654771 10.989628
7 7.411221 10.947957
8 7.210082 10.893854
9 7.038593 10.870361
[array([10.87036])]
learn.save('multi_anchor_189_final')
def plot_results(batch_num, thresh):
val_iter = iter(md.val_dl)
for i in range(batch_num):
next(val_iter)
x,y = next(val_iter)
y = V(y)
batch = learn.model(V(x))
b_clas,b_bb = batch
x = to_np(x)
fig, axes = plt.subplots(4, 3, figsize=(9, 12))
for idx,ax in enumerate(axes.flat):
ima=md.val_ds.ds.denorm(x)[idx]
bbox,clas = get_y(y[0][idx], y[1][idx])
a_ic = actn_to_bb(b_bb[idx], anchors)
clas_pr, clas_ids = b_clas[idx].max(1)
clas_pr = clas_pr.sigmoid()
# print(clas_pr.max().data[0]*thresh)
# torch_gt(ax, ima, a_ic, clas_ids, clas_pr, clas_pr.max().data[0]*thresh)
torch_gt(ax, ima, a_ic, clas_ids, clas_pr, thresh)
plt.tight_layout()
fig_name = f'plots-7-batch-{batch_num}.png'
plt.savefig(fig_name)
print(f'')
plt.close(fig)
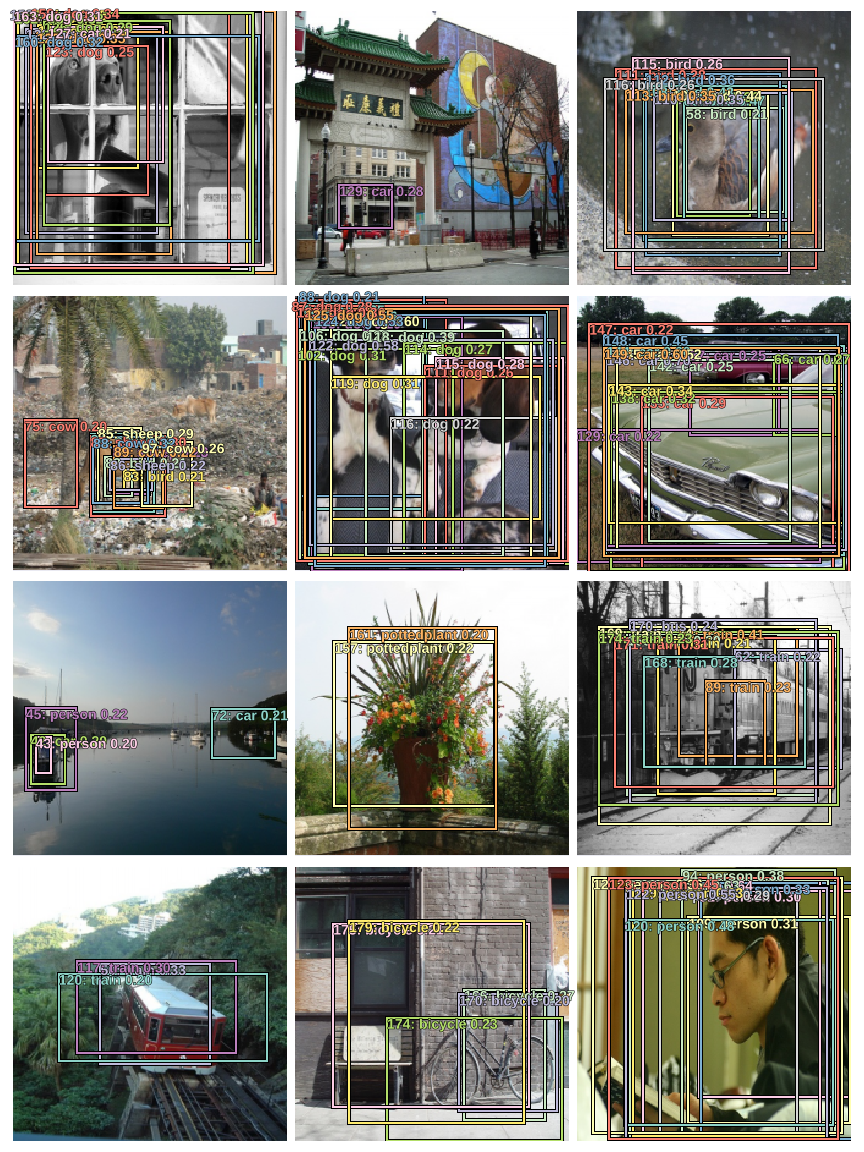
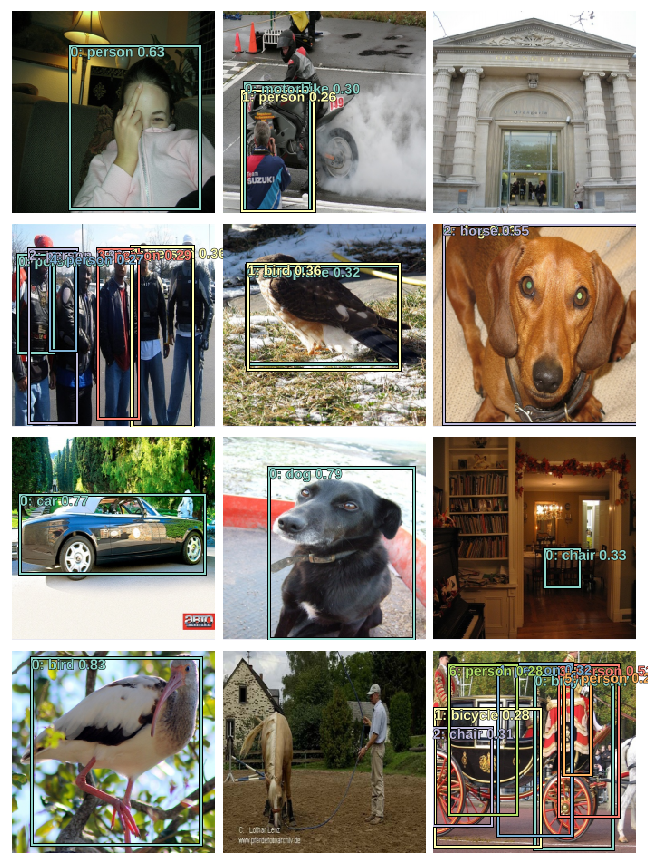
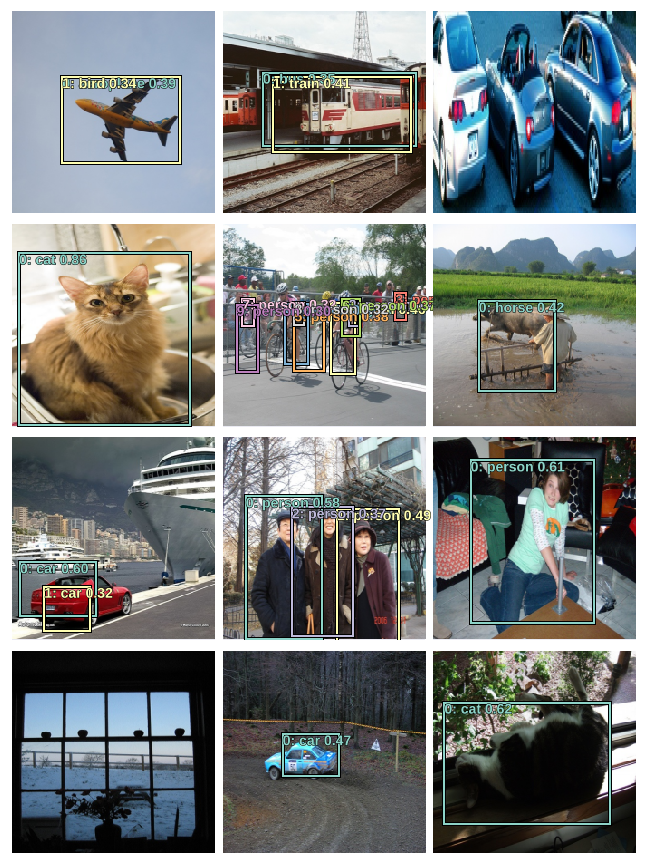
plot_results(1, 0.2)
plot_results(2, 0.2)
Non-Max Suppression
As seen in the results above the model is predicting multiple bounding boxes per object with varying confidences. We need have a mechanism to filter down to the most appropriate bounding box for a given object. This is done by Non-Max Suppression.
First, we filter out most boxes by using a confidence threshold. For the remaining boxes we do this:
- Pick a pair of boxes. If they have a jaccard overlap of more than a threshold and they’re predicting the same class, we’ll assume they’re predicting the same object, and discard the box with lower confidence.
- We do this till we have boxes where no two overlap more than the jaccard threshold.
def nms(boxes, scores, overlap=0.5, top_k=100):
keep = scores.new(scores.size(0)).zero_().long()
if boxes.numel() == 0: return keep
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
area = torch.mul(x2 - x1, y2 - y1)
v, idx = scores.sort(0) # sort in ascending order
idx = idx[-top_k:] # indices of the top-k largest vals
xx1 = boxes.new()
yy1 = boxes.new()
xx2 = boxes.new()
yy2 = boxes.new()
w = boxes.new()
h = boxes.new()
count = 0
while idx.numel() > 0:
i = idx[-1] # index of current largest val
keep[count] = i
count += 1
if idx.size(0) == 1: break
idx = idx[:-1] # remove kept element from view
# load bboxes of next highest vals
torch.index_select(x1, 0, idx, out=xx1)
torch.index_select(y1, 0, idx, out=yy1)
torch.index_select(x2, 0, idx, out=xx2)
torch.index_select(y2, 0, idx, out=yy2)
# store element-wise max with next highest score
xx1 = torch.clamp(xx1, min=x1[i])
yy1 = torch.clamp(yy1, min=y1[i])
xx2 = torch.clamp(xx2, max=x2[i])
yy2 = torch.clamp(yy2, max=y2[i])
w.resize_as_(xx2)
h.resize_as_(yy2)
w = xx2 - xx1
h = yy2 - yy1
# check sizes of xx1 and xx2.. after each iteration
w = torch.clamp(w, min=0.0)
h = torch.clamp(h, min=0.0)
inter = w*h
# IoU = i / (area(a) + area(b) - i)
rem_areas = torch.index_select(area, 0, idx) # load remaining areas)
union = (rem_areas - inter) + area[i]
IoU = inter/union # store result in iou
# keep only elements with an IoU <= overlap
idx = idx[IoU.le(overlap)]
return keep, count
def show_batch_with_nms(batch_num, conf_threshold=0.2, jaccard_threshold=0.3):
val_iter = iter(md.val_dl)
for i in range(batch_num):
next(val_iter)
x,y = next(val_iter)
y = V(y)
batch = learn.model(V(x))
b_clas,b_bb = batch
x = to_np(x)
fig, axes = plt.subplots(4, 3, figsize=(9, 12))
for idx,ax in enumerate(axes.flat):
ima=md.val_ds.ds.denorm(x)[idx]
bbox,clas = get_y(y[0][idx], y[1][idx])
a_ic = actn_to_bb(b_bb[idx], anchors)
clas_pr, clas_ids = b_clas[idx].max(1)
clas_pr = clas_pr.sigmoid()
conf_scores = b_clas[idx].sigmoid().t().data
out1,out2,cc = [],[],[]
for cl in range(0, len(conf_scores)-1):
c_mask = conf_scores[cl] > conf_threshold
if c_mask.sum() == 0: continue
scores = conf_scores[cl][c_mask]
l_mask = c_mask.unsqueeze(1).expand_as(a_ic)
boxes = a_ic[l_mask].view(-1, 4)
ids, count = nms(boxes.data, scores, jaccard_threshold, 50)
ids = ids[:count]
out1.append(scores[ids])
out2.append(boxes.data[ids])
cc.append([cl]*count)
if not cc:
# print(f"{idx}: empty array")
ax.imshow(ima)
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
else:
cc = T(np.concatenate(cc))
out1 = torch.cat(out1)
out2 = torch.cat(out2)
torch_gt(ax, ima, out2, cc, out1, 0.1)
plt.tight_layout()
fig_name = f'plots-8-batch-{batch_num}.png'
plt.savefig(fig_name)
print(f'')
plt.close(fig)
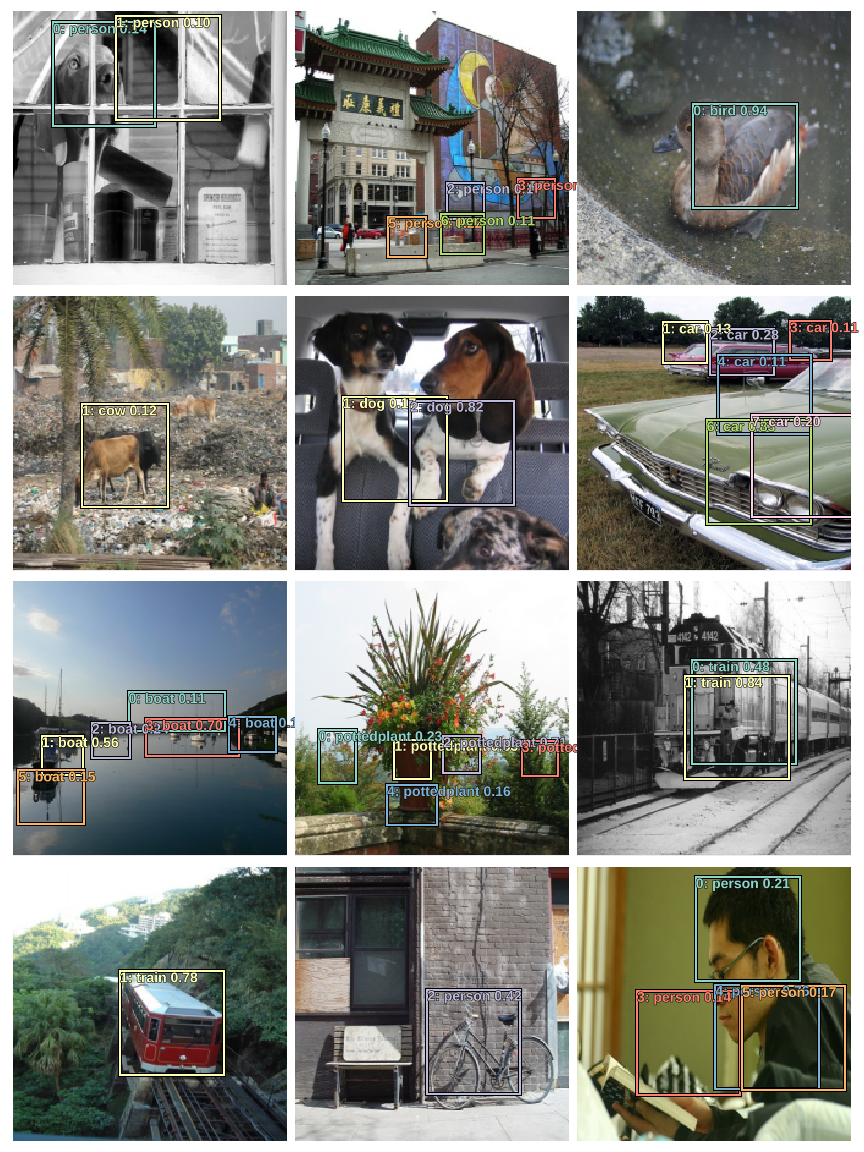
show_batch_with_nms(batch_num=1, conf_threshold=0.25, jaccard_threshold=0.35)
show_batch_with_nms(batch_num=2, conf_threshold=0.25, jaccard_threshold=0.35)
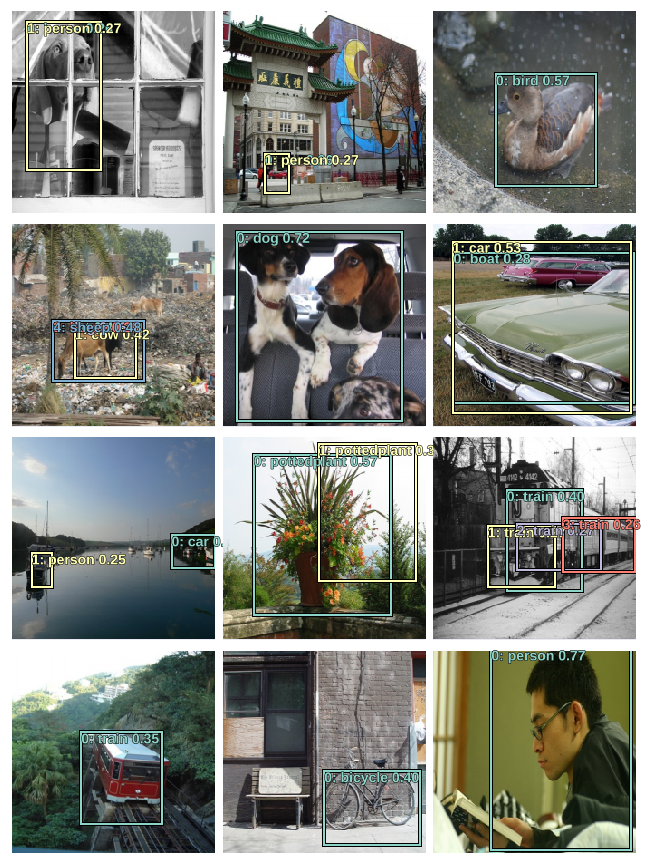
show_batch_with_nms(batch_num=3, conf_threshold=0.25, jaccard_threshold=0.35)
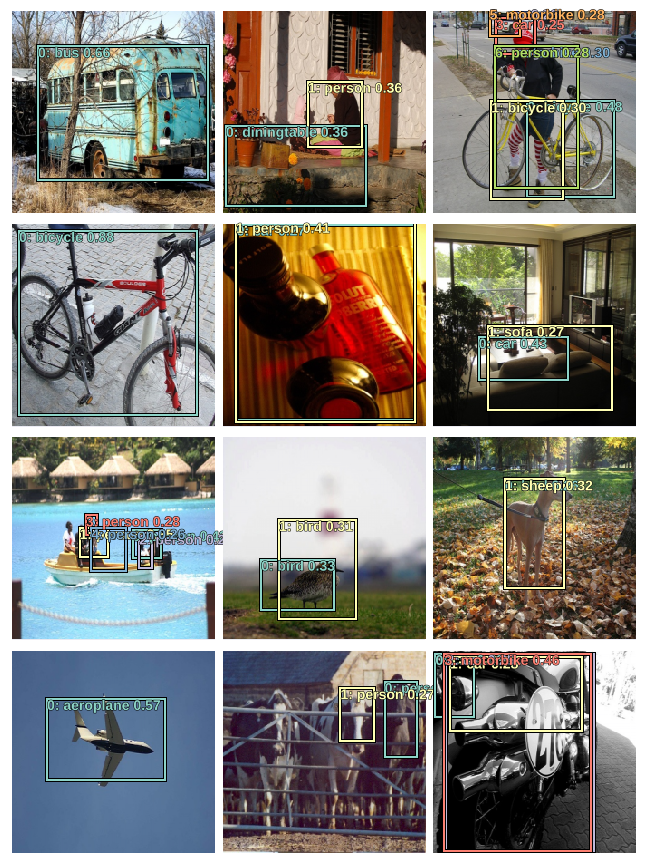
show_batch_with_nms(batch_num=4, conf_threshold=0.25, jaccard_threshold=0.35)
show_batch_with_nms(batch_num=5, conf_threshold=0.3, jaccard_threshold=0.4)
show_batch_with_nms(batch_num=6, conf_threshold=0.3, jaccard_threshold=0.4)
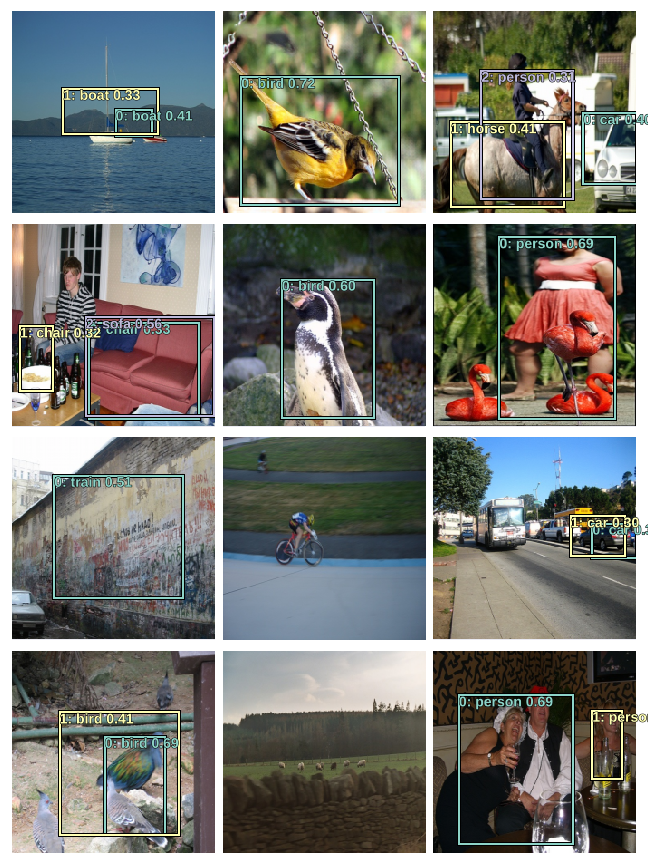
This concludes my initial exploration into the workings of object detection using deep neural networks. It took me a couple of weeks to fully grasp the concepts, and the whole exercise definitely improved my understanding of convnets.